Autonomous Package Delivery Robot
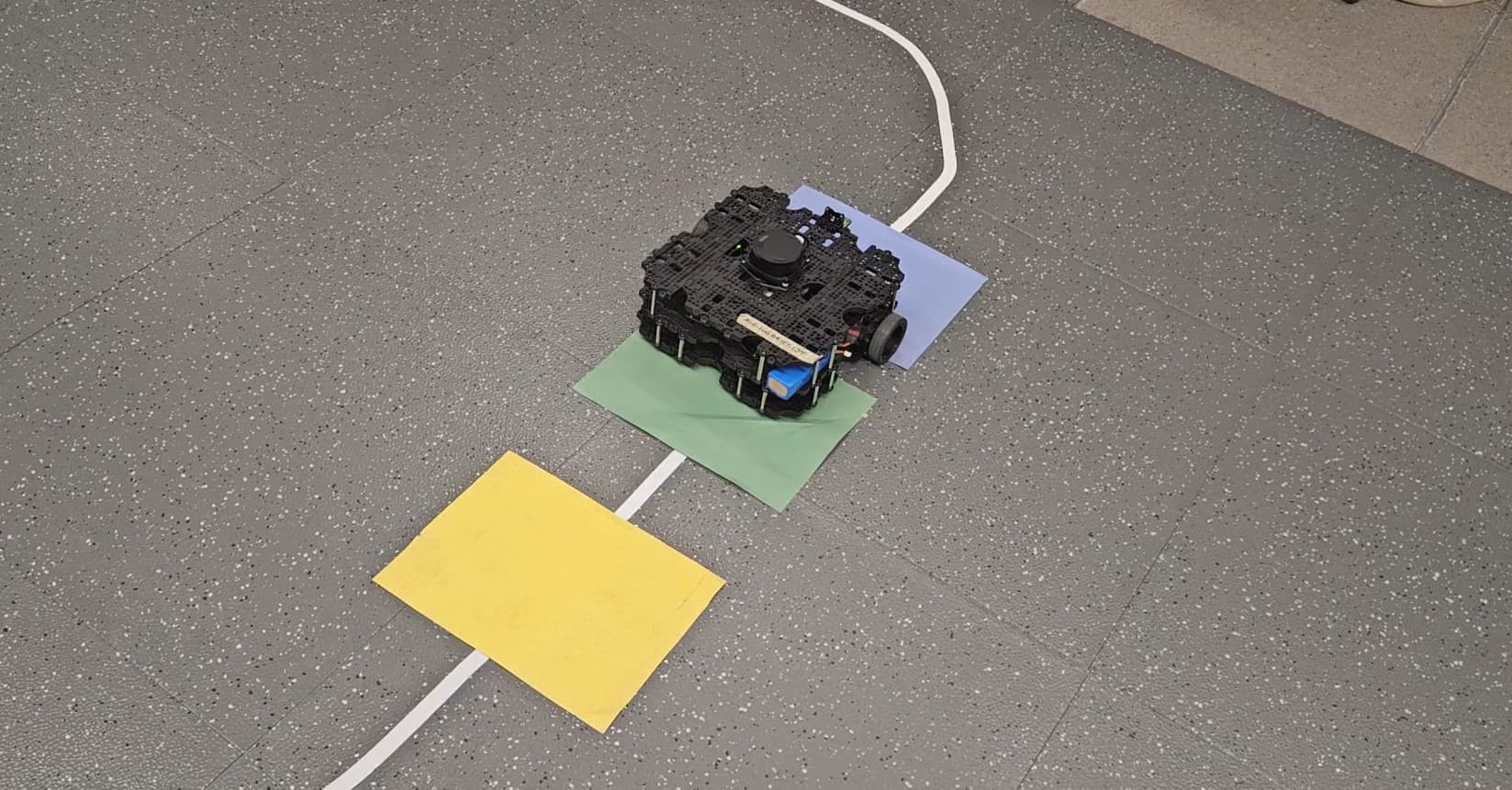
This project involved designing and implementing an autonomous package delivery robot using the TurtleBot 3 Waffle Pi platform. The robot was tasked with navigating a closed-loop hallway environment, identifying delivery points represented by colored patches, and executing precise delivery maneuvers.
The navigation system combined a finely tuned PID controller for line-following with Bayesian Localization for accurate state estimation. The PID controller, implemented in ROS, dynamically adjusted the robot's angular velocity to maintain smooth tracking of the white tape path. Localization was achieved by processing color data from the robot's camera, classifying it into predefined categories using HSV thresholds, and updating the robot's position probabilities based on Bayesian principles.
Key innovations included adaptive thresholding to account for environmental lighting variations and dynamic confidence checks to trigger delivery actions.
The robot's delivery mechanism was automated through a series of sequential actions: stopping at the correct office, performing a 90-degree turn, pausing to simulate delivery, and reorienting itself to continue navigation.